Robots That Can Feel
Companion robots are said to be the wave of the future and a cure for older adults that are socially isolated, along with helping to alleviate caregiver shortages in aging populations. “Aging in Place” support continues to grow but social isolation can be the result of such programs, and the COVID-19 pandemic has pushed the need for companionship in later life to the forefront. Typically pets are suggested in such situations but can also add health risks and an owner’s inability to perform necessary pet feeding and care, which has led to the development of companion robots that can provide the companionship needed but are less burdensome to the older population.
In theory, companion robots are a good idea, providing at least some of the social interaction needed in such situations, and also providing some of the physical assistance needed for an aging population, however acceptance has been minimal, with cost, the need for technology updates, and a reticence for non-human interaction being the most cited reasons for the lack of acceptance. Studies that compare choices from older adult samples with various types of companion robots indicate that there was little consistency in results, not surprising given the diverse attitudes that participants defined about themselves early in the study. Some were ‘loners’ who liked robots that did not speak but were ‘cuddly’, while others, who considered themselves more social, liked those robots that were more chatty and could follow them around or would wait for them at the front door, although others complained that they did not like being told what to do, even if it was to their benefit.
While many cited being able to turn off the robot as an important feature, those robots that spoke were prone to be criticized more, with comments like ‘Too pushy’, or ‘I didn’t like the voice’, which leads developers to try to sense the situation and mood of the companion robot’s ‘owner’ in order to tailor the robot’s attitude, either vocally or physically, to the short-term situation. Parsing language and the subtleties of emotion are complex and require considerable processing power, likely beyond the capabilities of a Teddy Bear type robot, but tactile sensations are a way for robots to gain some understanding of their owner’s state of mind. A hug or even a slap can give input to a companion robot that it could not get from verbal context, but is lacking with most companion robots.
We step forward to a group of researchers at the Korea Advanced Institute of Science & Technology (KAIST) who have developed an ‘elastomeric robotic skin’ that has the ability to sense tactile sensations and can be applied to an entire robot, with the result a human skin-like covering that allows for the interaction needed to maintain effective social contact and responsiveness. While many ‘robotic skins’ have been developed over the years, most are either fragile, too complex for effective production, or not scalable. By using elastomers[1], hydrogels[2], and tomographic imaging[3] researchers have created a layered artificial skin that contains electrodes or microphones that measure changes in resistance and vibrations due to touch, while conforming to the touch but returning to normal shape. The material can be easily repaired if torn or cut and remains operative regardless of it need for repair.
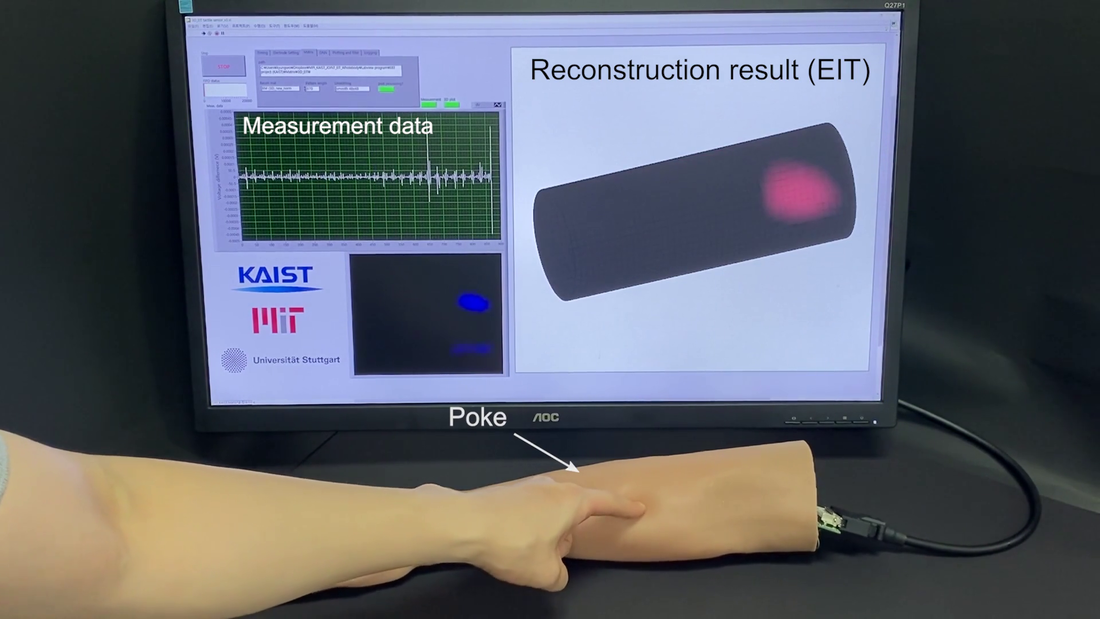
The complexity of the algorithms used to compute the characteristics of the touch on the skin are complex but the construction of the skin involves relatively simple known process steps, including 3D printing, and while the measurement electronics are still cumbersome, they were designed to collect far more data than would be necessary in a commercial product. The movies (snapshots below), which are available for download at https://www.science.org/doi/10.1126/scirobotics.abm7187 give an idea of how the robotic skin reacts to stimuli, particularly more subtle types and how the system is able to perceive what type of stimuli they are, and an example of how easily the skin is repaired. Unfortunately the entire article, which was published in Science Robotics is not available to the public (unless you pay $30), but the concept of providing tactile sensation in a cost effective manner to robotics is an important one in creating companion robots that are responsive enough to conquer both an innate fear of a mechanical object and the more personal need for responsive communication. It will be years before companion robots can be designed that will fulfill the needs of an aging population but such a skin is certainly a step in the right direction.
[1] Usually polymer long-chain coiled molecules that can be stretched but return to their original shape
[2] Polymers that are absorbent but remain structurally defined and do not dissolve in water.
[3] A process by which waves can be concentrated on a horizontal or vertical ‘slice’ of an object. When the wave is scanned, a 3D image of the area can be produced as in a CAT scan.
Park, K. P., Yuk, H. Y., Cho, J. C., Lee, H. L., & Kim, J. K. (2022). A biomimetic elastomeric robot skin using electrical impedance and acoustic tomography for tactile sensing. Science Robotics, 7(67). https://doi.org/10.1126/scirobotics.abm7187
In theory, companion robots are a good idea, providing at least some of the social interaction needed in such situations, and also providing some of the physical assistance needed for an aging population, however acceptance has been minimal, with cost, the need for technology updates, and a reticence for non-human interaction being the most cited reasons for the lack of acceptance. Studies that compare choices from older adult samples with various types of companion robots indicate that there was little consistency in results, not surprising given the diverse attitudes that participants defined about themselves early in the study. Some were ‘loners’ who liked robots that did not speak but were ‘cuddly’, while others, who considered themselves more social, liked those robots that were more chatty and could follow them around or would wait for them at the front door, although others complained that they did not like being told what to do, even if it was to their benefit.
While many cited being able to turn off the robot as an important feature, those robots that spoke were prone to be criticized more, with comments like ‘Too pushy’, or ‘I didn’t like the voice’, which leads developers to try to sense the situation and mood of the companion robot’s ‘owner’ in order to tailor the robot’s attitude, either vocally or physically, to the short-term situation. Parsing language and the subtleties of emotion are complex and require considerable processing power, likely beyond the capabilities of a Teddy Bear type robot, but tactile sensations are a way for robots to gain some understanding of their owner’s state of mind. A hug or even a slap can give input to a companion robot that it could not get from verbal context, but is lacking with most companion robots.
We step forward to a group of researchers at the Korea Advanced Institute of Science & Technology (KAIST) who have developed an ‘elastomeric robotic skin’ that has the ability to sense tactile sensations and can be applied to an entire robot, with the result a human skin-like covering that allows for the interaction needed to maintain effective social contact and responsiveness. While many ‘robotic skins’ have been developed over the years, most are either fragile, too complex for effective production, or not scalable. By using elastomers[1], hydrogels[2], and tomographic imaging[3] researchers have created a layered artificial skin that contains electrodes or microphones that measure changes in resistance and vibrations due to touch, while conforming to the touch but returning to normal shape. The material can be easily repaired if torn or cut and remains operative regardless of it need for repair.
The complexity of the algorithms used to compute the characteristics of the touch on the skin are complex but the construction of the skin involves relatively simple known process steps, including 3D printing, and while the measurement electronics are still cumbersome, they were designed to collect far more data than would be necessary in a commercial product. The movies (snapshots below), which are available for download at https://www.science.org/doi/10.1126/scirobotics.abm7187 give an idea of how the robotic skin reacts to stimuli, particularly more subtle types and how the system is able to perceive what type of stimuli they are, and an example of how easily the skin is repaired. Unfortunately the entire article, which was published in Science Robotics is not available to the public (unless you pay $30), but the concept of providing tactile sensation in a cost effective manner to robotics is an important one in creating companion robots that are responsive enough to conquer both an innate fear of a mechanical object and the more personal need for responsive communication. It will be years before companion robots can be designed that will fulfill the needs of an aging population but such a skin is certainly a step in the right direction.
[1] Usually polymer long-chain coiled molecules that can be stretched but return to their original shape
[2] Polymers that are absorbent but remain structurally defined and do not dissolve in water.
[3] A process by which waves can be concentrated on a horizontal or vertical ‘slice’ of an object. When the wave is scanned, a 3D image of the area can be produced as in a CAT scan.
Park, K. P., Yuk, H. Y., Cho, J. C., Lee, H. L., & Kim, J. K. (2022). A biomimetic elastomeric robot skin using electrical impedance and acoustic tomography for tactile sensing. Science Robotics, 7(67). https://doi.org/10.1126/scirobotics.abm7187
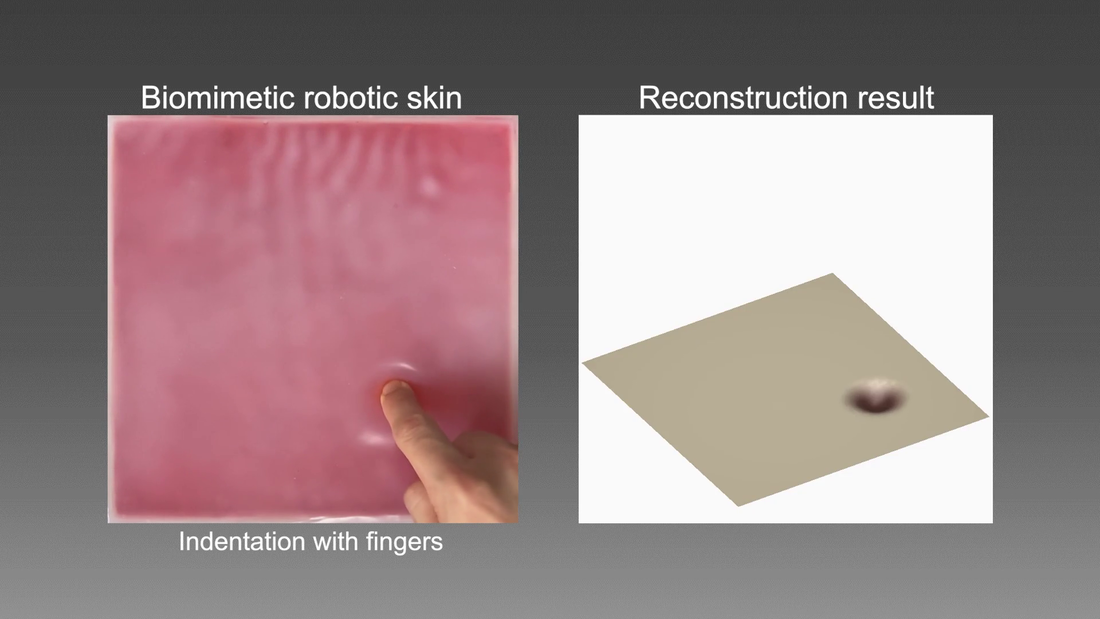
Robotic Skin Showing Touch Sensitivity - Source: See Citation
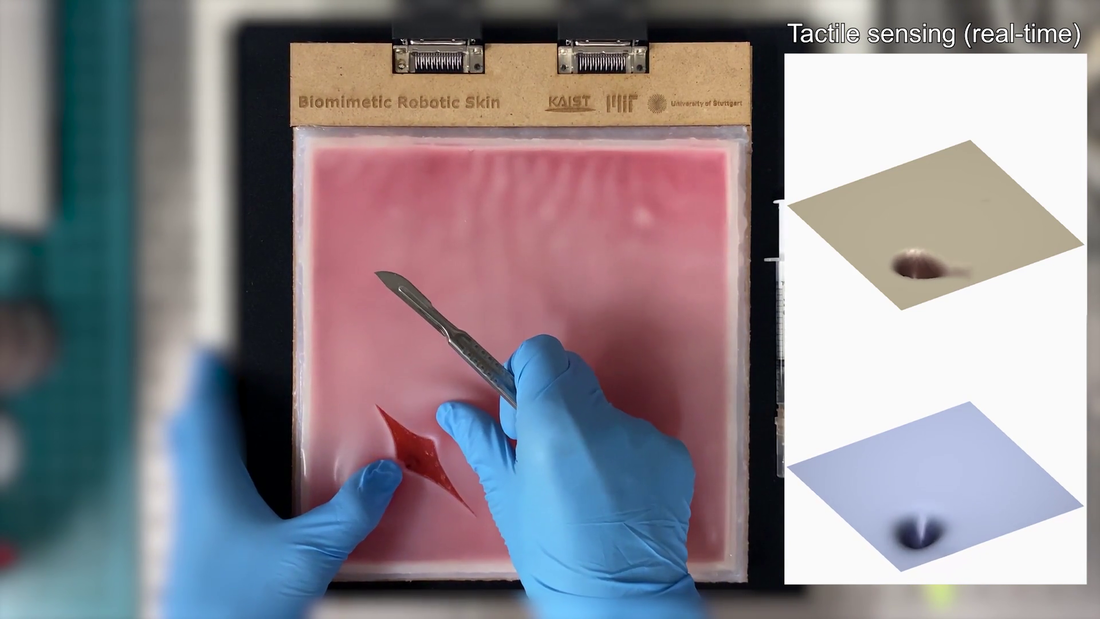
Robotic Skin Repair (1) - Source: See Citation
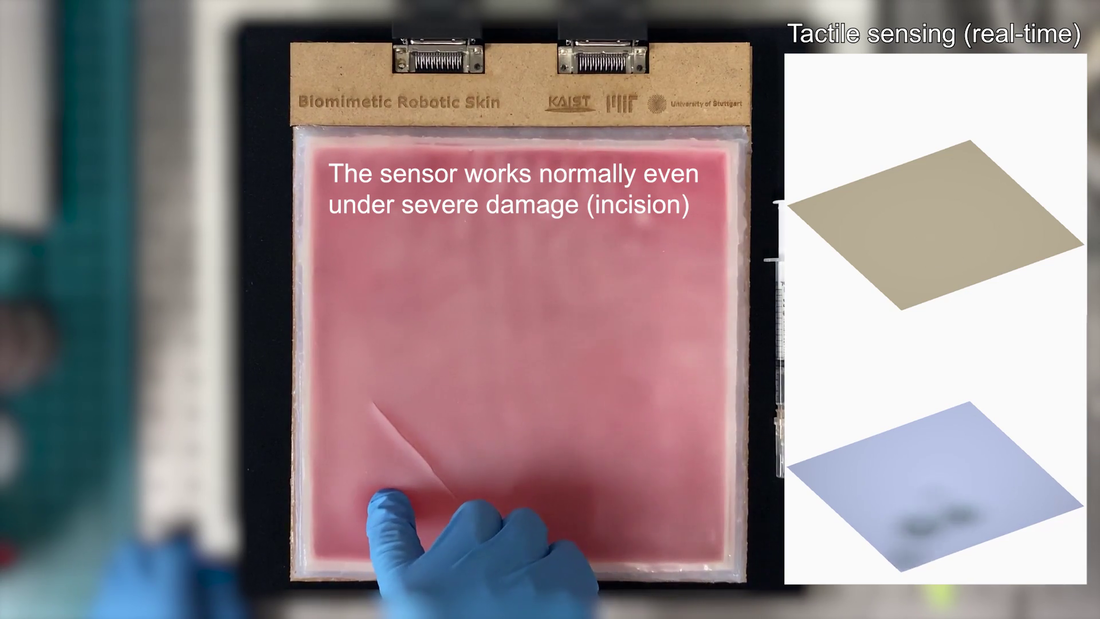
- Robotic Skin Repair (2) - Source: See Citation
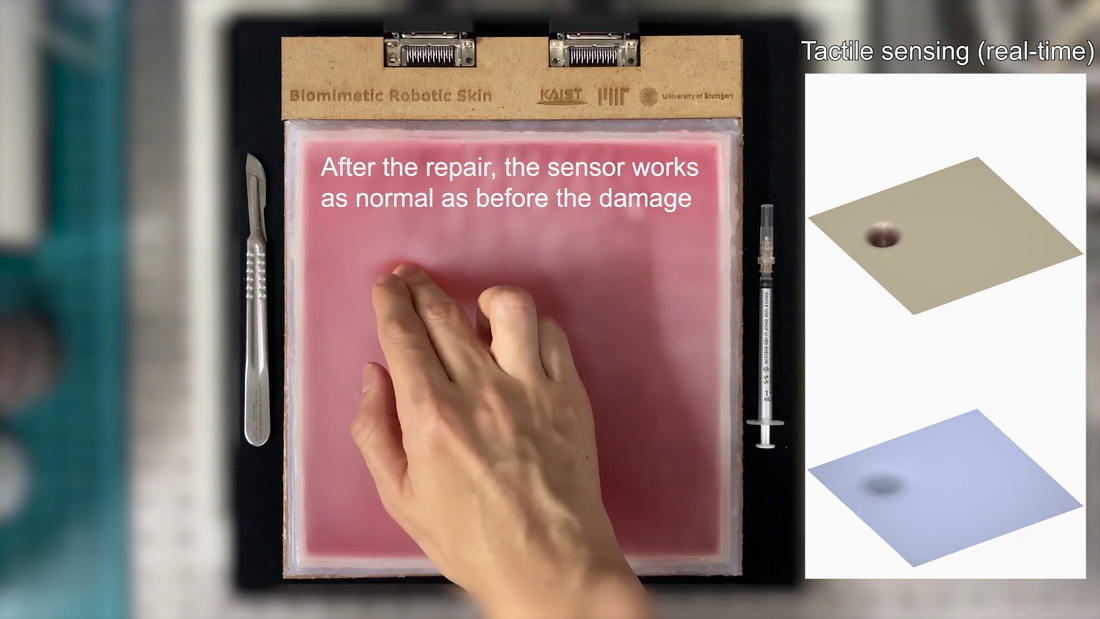
Robotic Skin Repair (3) - Source: See Citation
Robotic Skin on Robotic Arm - Source: See Citation
 RSS Feed
RSS Feed